

WORKS 開発事例
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
(2025年9月19日時点の記事です。)
当社では、日本科学未来館(以下、未来館)などが中心となり開発した、視覚障がい者向けナビゲーションロボット「AIスーツケース」の開発に携わっております。
新機能を搭載したAIスーツケース(以下、新型AIスーツケース)は、現在、大阪・関西万博にて実証実験が行われています。
※万博での実証実験に関する詳細は、こちらをご覧ください。
https://www.miraikan.jst.go.jp/news/general/202504113963.html

開発における当社の関わり
当社は協力企業として、新型AIスーツケースの開発において、ハードウェア・ソフトウェア開発の技術協力として機体の製作を担当いたしました。
<ハードウェア>
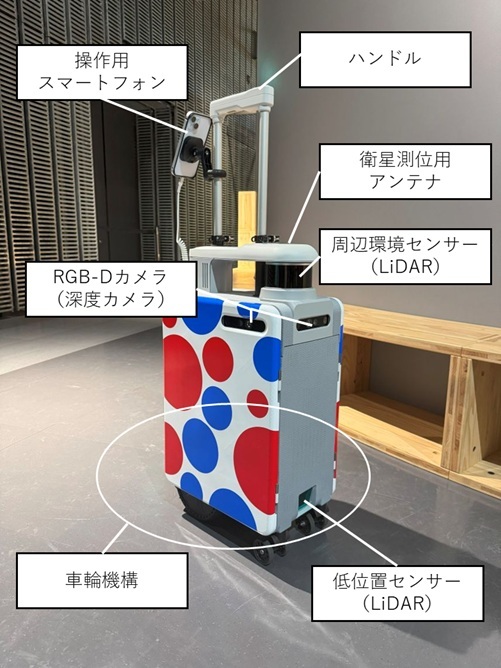
以下は、新型AIスーツケースを構成する代表例であり、
これら全ての部品選定と必要な電子回路設計をはじめとしたハードウェア開発を行いました。
■ AIスーツケースが自身の位置を正確に把握し、周りの状況に合わせて安全なルートを選ぶための
「LiDAR (ライダー:Light Detection And Ranging)センサー」・「RGB-D(深度)カメラ」
■ 屋外走行において、起動直後などのLiDARセンサーだけの測位では不十分な部分を補完するための
「RTK-GNSS(Real-Time Kinematic Global Navigation Satellite System:衛星測位対応アンテナ)」
■ 画像処理をはじめとした、各種機能の膨大な量のデータを高速で処理が可能となる、
「GPU(Graphics Processing Unit、画像処理装置)が組み込まれたコンピューター」
<ソフトウェア>
新型AIスーツケースが、人や障害物を避けながら目的地まで安全にユーザーを案内するための
ナビゲーション機能の精度向上に関するソフトウェア開発。

クフウシヤ内 開発リーダー インタビュー <ソフトウェア編>
当社では、ハード・ソフト・電気の3チームに分かれて連携し、本プロジェクトに取り組みました。
3チームを束ねた当社の開発リーダーが、当社の取り組みを振り返りました。今回は、【ソフトウェア編】となります。
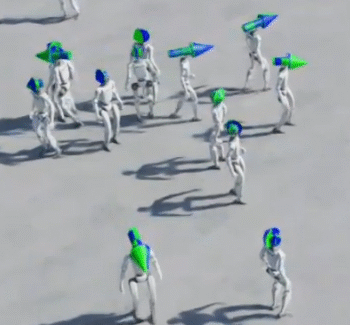
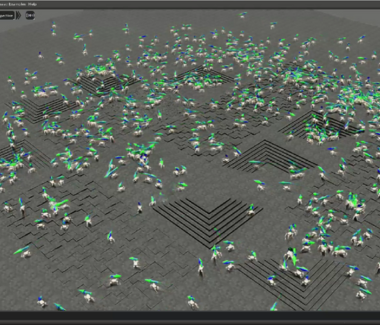
シミュレーションから始まる開発の舞台裏
新型AIスーツケースの開発において、序盤に取り組んだのは「歩行者回避アルゴリズム」の開発です。
しかし、いきなり実機でのテストはできません。
万が一の事故を防ぐためにも、まずは専用のシミュレーションシステムを構築し、テスト・評価を繰り返す環境を整えました。
シミュレーションでは、新型AIスーツケースと歩行者の挙動に関する様々なテストシナリオをもとに、検証を行いました。
例えば、新型AIスーツケースの動作中に歩行者が様々な角度から侵入してくるシナリオや、新型AIスーツケースの後ろから歩行者が接近するシナリオなどです。
こうしたシナリオで新型AIスーツケースがうまく動作したかどうかを判断するためには、
あらかじめ評価の基準を決めておく必要があります。
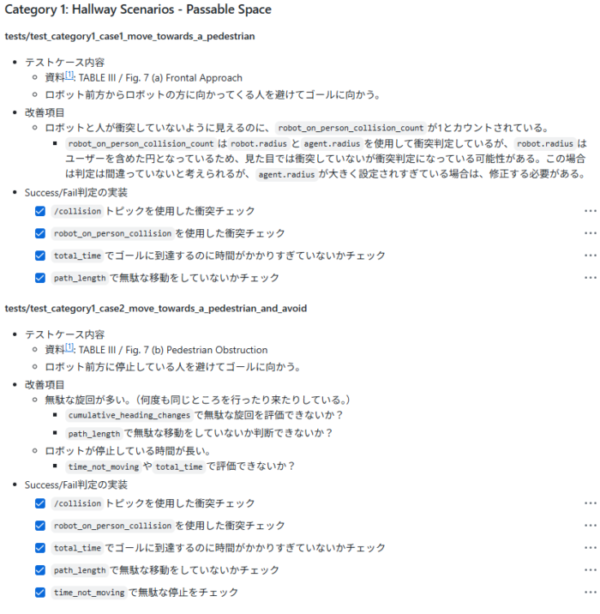
例えば、何秒以内に目的地に到達できたかどうか、新型AIスーツケースが旋回しすぎていないかどうか、
といった定量的な項目を設定し、成功・失敗を判断できるようにしました。
これらの評価指標は、Githubの公開コードや海外論文を参考に評価アルゴリズムを決定し、実装しました。
他にも、エレベーターの利用や狭い通路での移動をはじめとする実際の利用シーンを想定したテストケースなど、
多様なパターンのシミュレーションでのテスト・評価をすることで、新型AIスーツケースの動作の改善を行っていきました。
安全性と快適性の両立を追求
開発の中で特に時間をかけた点は、「安全性」と「快適性」のバランスです。
新型AIスーツケースは、視覚障がいのある方の利用を想定しています。
ただ、他の歩行者とぶつからなければ良いという単純な問題ではありません。
例えば、歩行者との衝突を避けるために急停止すると、新型AIスーツケースの動きが不自然になり、
利用者は快適に歩行することはできません。
一方で、緩やかに減速すれば、歩行者にぶつかってしまうリスクが高まります。
また、人が多い場所では、ロボットと人が極端に近づき、人間のパーソナルスペースが侵害されることも不快に感じられます。
私たちは、この「安全性」と「快適性」の両立を目指して開発を進めました。
複数アルゴリズムの組合せで最適解に辿り着く
歩行者回避アルゴリズムの開発において、最終的にたどり着いたのは、
単一のアルゴリズムに頼らず、複数の既存アルゴリズムを組み合わせて新型AIスーツケース用に改良するというアプローチです。
専用にカスタマイズされたアルゴリズムは、状況に応じて最適な行動を選択し、
利用者にとって自然で安心感のある歩行を実現します。


クフウシヤでは、「機能」だけではなく、利用者の使い心地にも配慮した開発に取り組みます。
大阪・関西万博での運用を通じて
新型AIスーツケースは、大阪・関西万博の会期中において、複数台が会場内で同時運用されています。
これは、実用スケールでのロボット稼働・ナビゲーション補正の課題抽出に繋がる貴重な機会と捉えています。
今後の実用化に繋がればと思っています。
技術検証から、社会実装まで。PoCの共創パートナーとして
クフウシヤは、技術にこだわり、実装まで伴走する開発パートナーです。
複雑な環境やハード/ソフトの協調開発が求められるPoCにおいても、社内実証の仕組みと設計・製作までを一貫して提供します。
大型プロジェクトでは、思い通りにいかないこともあります。
そんなときでも、明るく前向きに工夫して、お客様の次の一手をご提案いたします。

WORKS 関連事例
-

ロボット開発 2026.04.06
【TRON1】NavigationとMID360で障害物回避してみた!オドメトリ課題の解決方法【ROS2/自律移動】
-

ロボット開発 2026.03.31
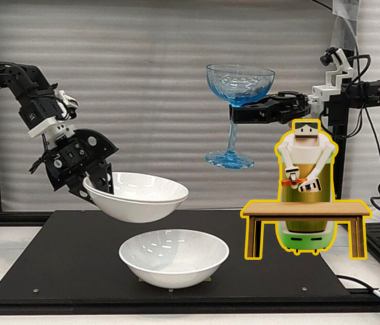
「おもてなし」をロボットへ。双腕アームロボット「OmniHost」が目指す、宿泊・飲食業の新しいかたち
-

ロボット開発 2026.01.20
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
-

ロボット開発 2025.12.11
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
-

ロボット開発 2025.10.30
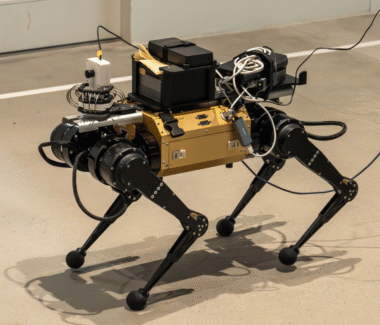
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-
ロボット開発 2025.06.04
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
-

ロボット開発 2025.05.30
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.05.21
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました
-
お知らせ 2025.07.30
フィジカルAIを活用した双腕アームロボットOmniHostが神奈川県事業に採択されました
-

お知らせ 2025.02.03
当社が開発に携わっている大阪・関西万博「AIスーツケース」がプレスリリースされました