

WORKS 開発事例
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
(2025年5月21日現在の記事です。)
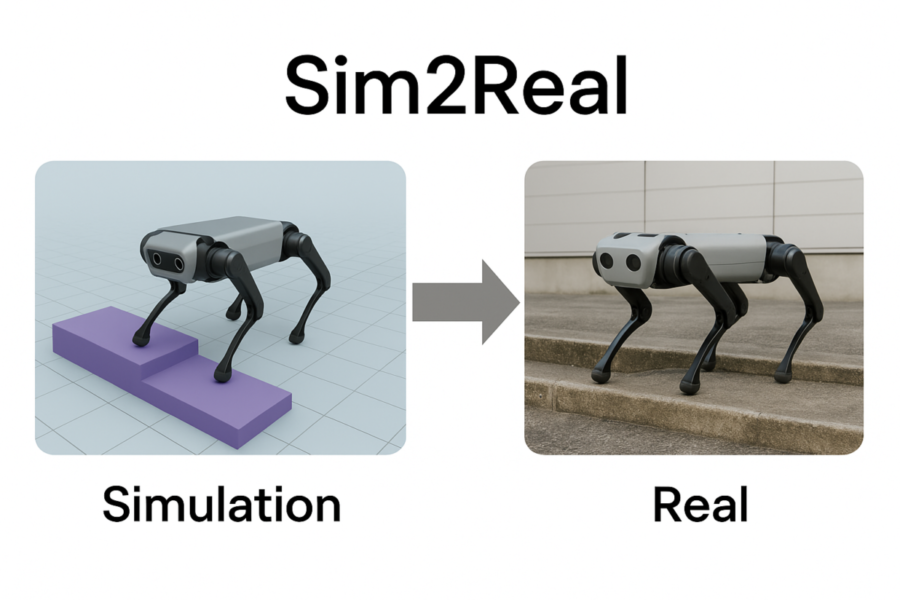
ロボット開発では、シミュレーションと実機テストの間に立ちはだかる大きな壁、「Sim2Realのギャップ」が課題となります。
クフウシヤでは、「NVIDIA Isaac Lab」と「Genesis環境」を活用し、国産四脚ロボットの開発を進めています。
Sim2Realと開発体制
Sim2Realとは?
ロボット開発では、初期段階から高価な実機を用いたテストは難しいため、仮想環境での動作検証が欠かせません。
Sim2Realとは、仮想環境上でAIアルゴリズムを用いてモデルを訓練し、その学習済みモデルを実機に適用する技術です。
これにより、コスト削減・開発スピード向上・安全性確保に貢献できます。
しかし、現実世界では、摩擦、センサー誤差、ハードウェア特性など、シミュレーションでは再現しきれない要素が多く存在します。
これにより、「シミュレーションでは動くが実機では動かない」という問題が発生します。
この「Sim2Realのギャップ」をいかに埋めるかが、実用化への鍵となります。
Isaac Labでのシミュレーション
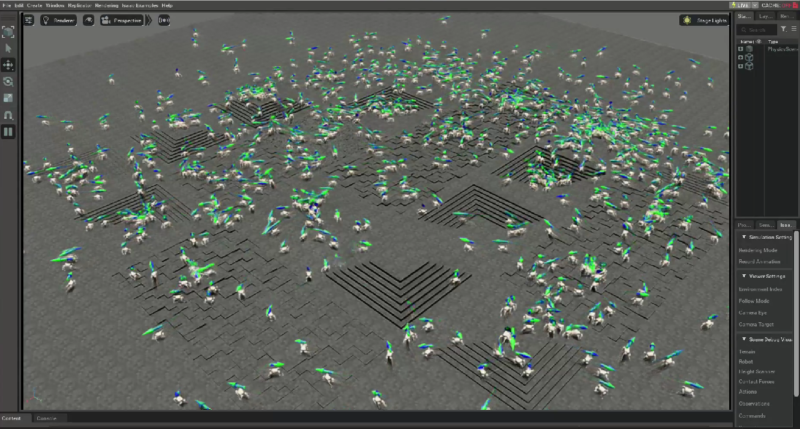
Isaac Labとは、NVIDIA社が提供するロボット開発用シミュレーションプラットフォームです。
高精度な物理エンジンとリアルなセンサーシミュレーションが統合されており、現実に近い物理挙動の再現が可能です。
強化学習や模倣学習との親和性が高く、 大規模な並列シミュレーションによる学習が行えます。
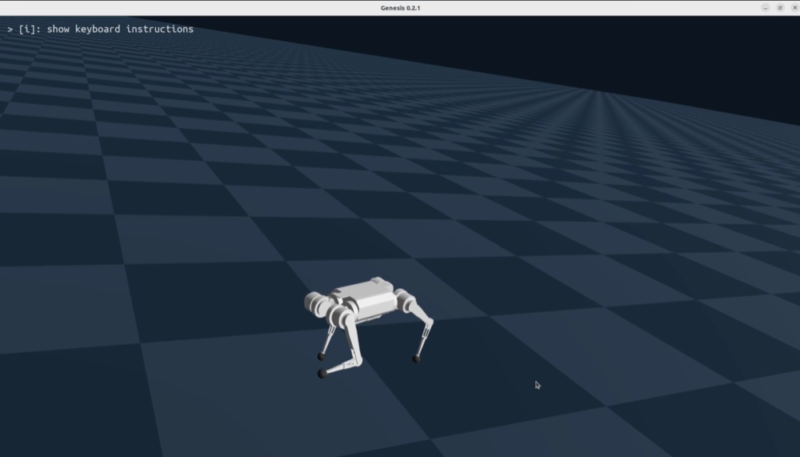
Genesis環境にて、Isaac labで学習したポリシーを自社開発の四脚ロボットに適用し、仮想環境上で歩行テストを実施します。
実環境に近い物理設定や複雑地形モデルを備えており、実機適用前に事前にSim2Simテストにて、
高精度な歩行性能評価を行うことで、ポリシーの検証を安全に行えます。
国産四脚ロボット開発の進捗
2025年GW期間で、イテレーション40万回を実施した強化学習モデルを作成しました。
学習結果は、こちらのとおりです。
✔約5cmの段差は安定して登降可能。
✔それ以上の段差は、後ろ向き動作なら一定の成功率で降りることが可能。
✔ 登りは、前脚先端が蹴込み板に引っかからなければ登れる可能性あり。
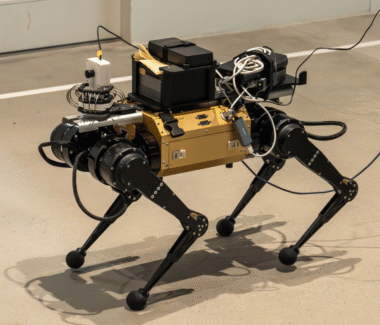
Sim2Realの上記プログラムで、クフウシヤのオリジナル国産四脚ロボットにて実機テストを行いました。
初回に現状ポリシー適用時には振動気味でしたが、制御ゲインの調整などを行い、バランスを崩しても立ち直る動作をするようになりました。
より複雑な作業補助が可能になることで、サービス現場での人手不足の解消を目的としています。
引き続き、実機へのスムーズな移行を目指し、開発を継続しています。
おわりに
クフウシヤでは、四脚ロボットの社会実装に向け、公共インフラ点検・工場内・災害対応・警備など様々な分野での実証実験を行います。
四脚ロボットをはじめとする新しいロボットの実現に向けて、PoCをご検討の際は、ぜひお気軽にご相談ください。
明るく前向きにクフウして、次の一手をご提案します
クフウシヤYouTubeチャンネルにて、国産四脚ロボット開発の様子をご覧になれます。
WORKS 関連事例
-

ロボット開発 2026.01.20
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
-

ロボット開発 2025.12.11
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
-

ロボット開発 2025.10.30
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-
ロボット開発 2025.06.04
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
-

ロボット開発 2025.05.30
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました
-
お知らせ 2025.07.30
フィジカルAIを活用した双腕アームロボットOmniHostが神奈川県事業に採択されました
-

お知らせ 2025.02.03
当社が開発に携わっている大阪・関西万博「AIスーツケース」がプレスリリースされました