

WORKS 開発事例
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
(2025年5月30日現在の記事です。)
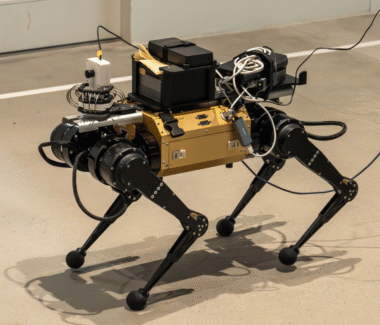
近年、災害対応やインフラ点検、工場内の自動巡回など、さまざまな現場で活躍が期待されているのが「四脚歩行ロボット」です。
四脚歩行ロボットは、一般的な車輪型ロボットと比べて、不整地(凸凹のある路面など)の移動にも優れています。
まるで動物のように4本の足で歩くこのロボットは、人の立ち入りが難しい場所でも高い安定性と柔軟性を発揮や、 広範囲での自律移動も期待できるため、世界中で注目されています。

クフウシヤの四脚歩行ロボット開発
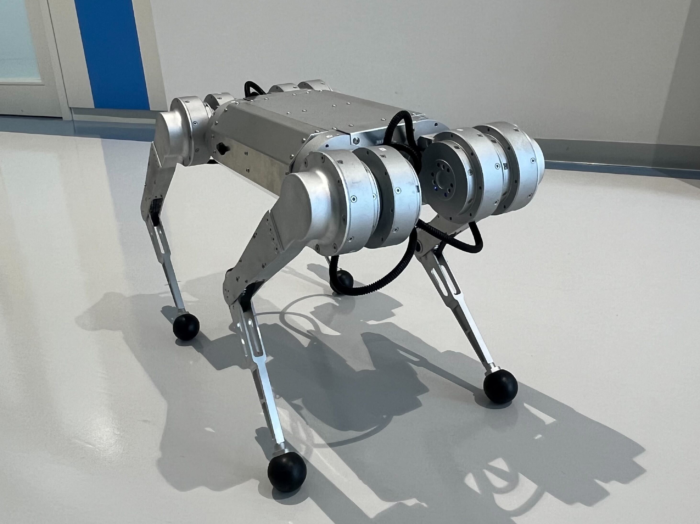
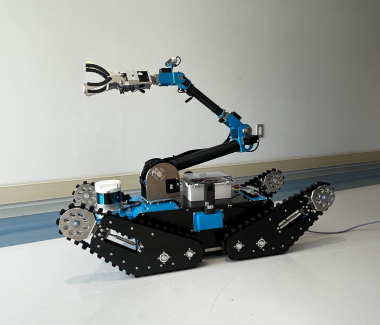
当社では、リアルな現場の声を元に、必要な機能をカスタマイズできる「国産製 四脚歩行ロボット」を開発しています。
■ 四脚歩行ロボットは高機能だけど、数千万するロボットの費用対効果が悩ましい。
■ 既存の海外製品もあるが、セキュリティ面が心配。
など、 使用する現場に特化した機能と実用性のバランスを両立した四脚歩行ロボットを目指しています。
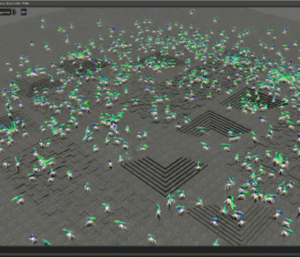
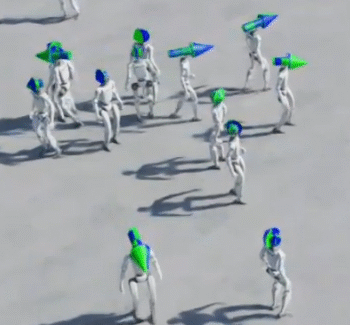
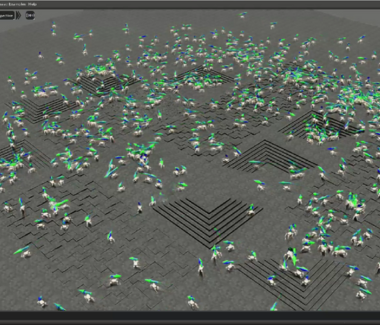
また、ロボット+AIを活用した高度な姿勢制御と歩容生成 の開発として、
シミュレーションでのロボットの動作と実機の動作のギャップを埋めるための「Sim2Sim」や「Sim2Real」にも挑戦しています。
これらは、ロボットの「姿勢制御」や「歩き方の生成」を機械学習を活用することで、 これまでにないレベルまで高度に進化させる今注目の技術です。
開発ポイント
<ハードウェア>
■ モータードライバーやマイコンの開発
四脚ロボットは、4本の脚があり、それぞれに複数のモーターがあるため、 同時に正確な制御ができることが非常に重要です。
これがうまくできないと、ロボットがよろけたり、転倒したりしてしまいます。
■ 電気設計や基板回路実装
ロボットの神経系を形にする工程です。
どれだけソフトウェアや機構が優れていても、この部分が不安定だとロボット全体が動作しません。
当社は、福島県南相馬市にある「福島ロボットテストフィールド」の中にも開発拠点があります。
ハードウェア製作では、地域のパートナー企業と連携し、 「MADE IN 福島」の製品開発を目指しています。
<ソフトウェア>
■ 安定した歩行を行うための動歩行制御
ロボットが安定して歩くためには、凸凹がある地面に対して、低衝撃で柔軟にうまく合わせながら歩くことが大切です。
そのために、「押されたときの力の伝わり方(やわらかさや反発)」をちょうどよく調整する仕組みが必要になります。
ロボットの足の動きや力をバランスよく調整できる「インピーダンス制御」という技術を使って、脚の動き方を細かく直すプログラム(アルゴリズム)を開発しています。
■ 自律移動するためのソフトウェア開発
コントローラー操作ではなく、自律移動で動作するためには、以下のような機能が必要です。
これらの機能が組み合わさることで、現場に特化した四脚歩行ロボットにカスタマイズができます。
・ SLAM
ロボットが自分の位置を把握し、周囲の地図をリアルタイムで作成します。
これにより、障害物あある環境でも安全に移動できます。
・Navigation
ロボットが目的地に向かって自律的に移動するための経路を計画し、障害物を避けながら歩きます。
・3D地形計測
ロボットは周囲の地形を3次元で立体的に把握し、段差や凸凹した不整地などを適切に認識して歩行動作を調整します。
・RTK-GNSS
屋外で高精度な位置情報を取得し、センチメートル単位で正確な移動をサポートします。
・映像伝送
ロボットに搭載されたカメラの映像をリアルタイムでオペレーターに伝送し、現場の状況を確認できるようにします。
・遠隔操縦
オペレーターがロボットを手動で操作できる機能で、複雑な地形や危険な状況での介入を可能にします。
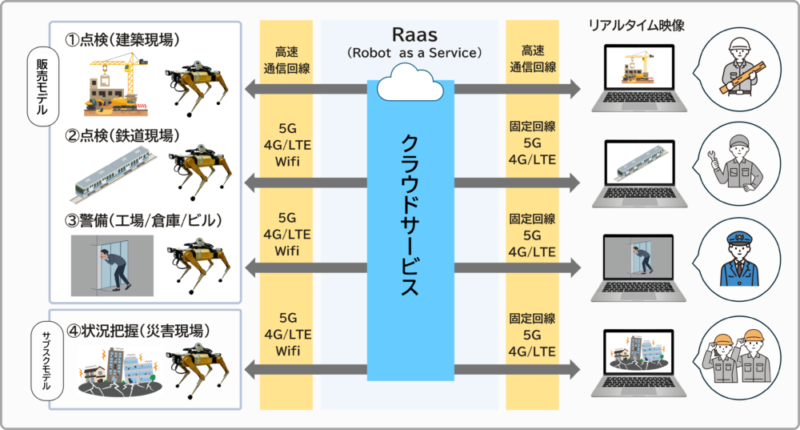
活用の用途例
当社が開発している四脚歩行ロボットの活用の用途は、以下のような現場での活用が期待されます。
■ 建設現場での点検
人が入れない場所や、トンネルなどの安全確認
■ 鉄道現場での点検作業
線路の上はドローンの飛行が禁止されており、砂利は車輛型ロボットには不向きな点がある。
■ 工場や倉庫での巡回警備
広範囲な敷地内を24時間体制での監視と異常検知
■ 災害現場での状況把握
人が入れるかどうか、要救助者の逃げ遅れがないか、などの迅速な情報収集
これまでの開発経過
現在、3年目の開発プロジェクトですが、最初から上手くいっていたわけではありません。
失敗と成功を繰り返し、改良しながらの連続です。
1年目には、ロボットの基礎となる歩行制御や基本的なセンサー技術を確立し、
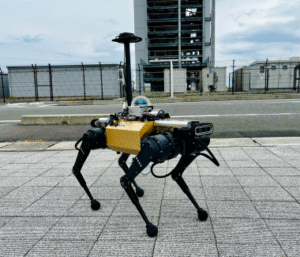
2年目には、複雑な地形や環境での自律移動、障害物回避技術を見据えた搭載物を追加し、アップデートしてきました。

3年目開発に向けて
四脚歩行ロボットの開発は、単なる技術の集積ではなく、現場で実際に役立つ「問題解決のツール」として進化しています。
クフウシヤでは、四脚歩行ロボットに限らず、様々なロボット開発に取り組んでいます。
PoCの段階から、社会実装に向けた高精度・高信頼の制御開発を行いたい企業様は、ぜひクフウシヤにご相談ください。
3年目の四脚ロボット開発記事はこちら
WORKS 関連事例
-

ロボット開発 2026.01.20
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
-

ロボット開発 2025.12.11
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
-

ロボット開発 2025.10.30
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-
ロボット開発 2025.06.04
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.05.21
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました
-
お知らせ 2025.07.30
フィジカルAIを活用した双腕アームロボットOmniHostが神奈川県事業に採択されました
-

お知らせ 2025.02.03
当社が開発に携わっている大阪・関西万博「AIスーツケース」がプレスリリースされました