

WORKS 開発事例
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
(2025年6月3日時点での記事です。)
当社は、神奈川県相模原市と福島県南相馬市の2拠点で、ロボット開発に取り組んでいます。
2019年に南相馬事務所を開設して以来、地元企業との連携を深め、地域に根差した開発にも携わってきました。
福島県南相馬市には、「南相馬ロボット産業協議会」という、金属加工などの地域の製造業を中心とした企業が集う団体があります。
当社もその一員として、地域の技術力向上や産業振興に貢献すべく活動しています。
今回は、南相馬ロボット産業協議会での共同開発プロジェクトとして、当社が開発に携わっている「災害対応ロボット MISORA2.0(ミソラツー)」と、国際的なロボット競技会「World Robot Summit」への挑戦についてご紹介します。
災害対応ロボット「MISORA2.0」プロジェクトとは?
地域技術の結晶「MISORA2.0」
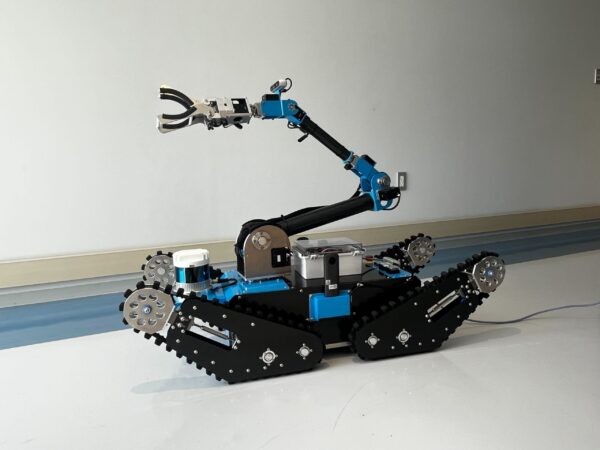
「MISORA2.0」は、南相馬ロボット産業協議会が中心となって開発を進めているクローラー型の災害対応ロボットです。
このプロジェクトは、単に災害対応ロボットを作るだけでなく、以下の目的を掲げています。
■ 地域企業の技術力向上: ロボット開発を通じて、参加企業の技術力を高めます。
■ 新規事業創出による地域活性化::新たなビジネスチャンスを生み出し、地域経済の活性化を目指します。
■ 地域内の産業人材育成:ロボット開発に関わる人材を育成し、将来の産業発展に貢献します。
「MISORA」という名前は、「Minamisoma Robotics Industry Association(南相馬ロボット産業協議会)」の頭文字から名付けられました。
World Robot Summitへの出場:世界の舞台へ
World Robot Summit(WRS)とは?
World Robot Summit(WRS)とは、ロボットの社会実装や研究開発の加速させることを目的とした、国際的なロボット複合イベントです。(WRS公式ページより引用)
2020年に開催された第1回「World Robot Summit 2020大会」では、初代MISORAが「災害対応標準性能評価チャレンジ部門」に出場し、世界第2位という成績を収めました。
「World Robot Summit 2025」への挑戦
そして2025年10月、World Robot Summit 実行委員会と福島国際研究開発機構(F-REI)の主催により、「World Robot Summit 2025 本大会」が開催されます。
この本大会では、産業現場の課題を解決するロボット技術を競う競技会として、「World Robot Summit 2025本体会」が開催されます。
初代MISORAの意志を受け継ぐ「MISORA2.0」は、大規模な災害によるプラント・トンネルなどを想定した、「プラント災害チャレンジ部門」への出場に向けて、以下の改良を重ねてきました。
■ 期待の小型化と軽量化
プラント災害のような複雑かつ狭い場所での活動でも小回りが利く設計と機能。
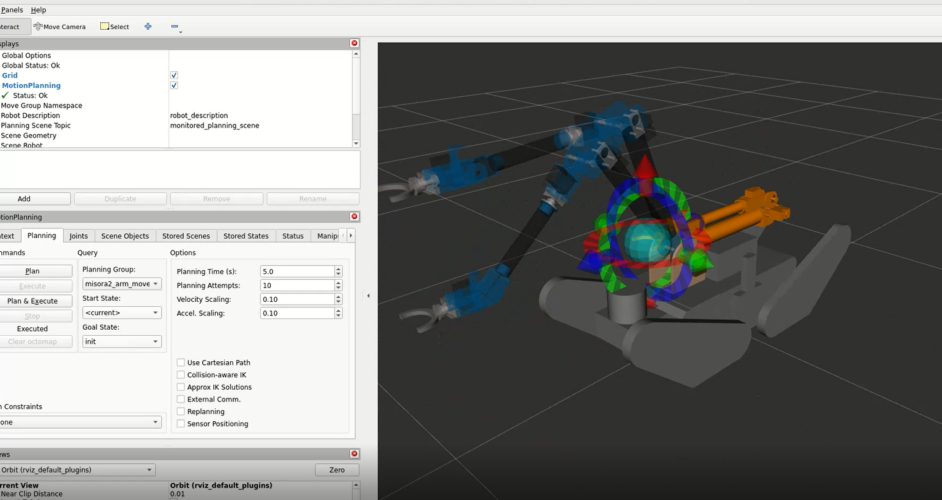
■ ROS(Robot Operating System)による制御
複雑な環境下でのタスクに対応するため、高度で柔軟な自律動作を実現するための共通プラットフォームを導入。
当社では、「ROSによる制御」を中心とした、MOSORA2.0のソフトウェア開発を担当しています。
World Robot Summit 2025本大会では、南相馬ロボット産業協議会と、ロボット開発・ソフトウェア開発に深い知見を持つ会津大学との共同チーム「MISORA+UoA」として出場します。
さらに、大会ではドローンとの連携ミッションにも挑戦し、より多角的で高度な災害対応にチャレンジします。

「MISORA2.0 」開発企業・大学
<ハードウェア>
・株式会社タカワ精密
・株式会社シンコー
・株式会社相馬製作所
・工製作所株式会社
・花沢技工
・ハヤシ精機
・藤倉コンポジット株式会社
<ソフトウェア>
・会津大学
・株式会社クフウシヤ
<ドローンオペレーター>
・株式会社ハマ (旧 株式会社スペースエンターテインメントラボラトリー)
クフウシヤが担当するソフトウェア開発
MISORA2.0の開発コンセプトは、「遠隔操作による安全で効率的な災害対応」です。
災害現場では、刻々と変化する状況を正確に把握し、迅速かつ安全に復旧活動を行う必要があります。
「MISORA2.0」は、そのために必要な様々な機能を搭載し、開発を進めています。
■ 遠隔操縦
危険区域での作業を人間に代わって行い、離れた場所からの操作を可能にします。
■ 移動性能
クローラとフリッパを用い、瓦礫や不整地でも安定した移動を可能にします。
■ アーム機能
障害物の移動や、カメラによるメータ読み取り、クラック・錆・QRコードの検出に対応します。
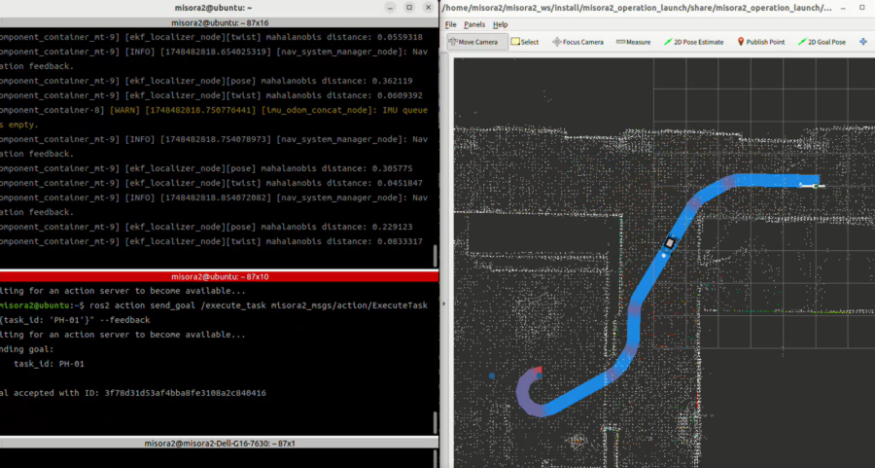
■ 環境認識
3D LiDARとカメラによって周囲環境を正確に把握します。
■ 自律移動
独自に開発を進めている自律移動Navigationパッケージにより、不整地での移動などを想定したクローラーのフリッパー部分のせり上げや、せり下げの角度調整など、最適なルートで移動する技術の実現にも挑戦しています。
World Robot Summit 2025 本大会に向けて:私たちの挑戦
2025年10月の本大会まで、残すところ約4か月となりました。
開発の中では、多くの発見や学びがある一方で、難易度の高いタスクをクリアするための技術的な課題や、調整の難しさに直面することも少なくありません。
当社ならではの「クフウした開発」をチーム一丸となってチャレンジしているところです。
この「World Robot Summit 2025」への出場を通じて、福島県のものづくり企業の高い技術力を発信し、私たちの挑戦が地域の活性化や新しいビジネスの創出に繋がることを信じて、これからもMISORA2.0開発について発信していきます。
WORKS 関連事例
-

ロボット開発 2026.01.20
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
-

ロボット開発 2025.12.11
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
-

ロボット開発 2025.10.30
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-

ロボット開発 2025.05.30
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.05.21
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました
-
お知らせ 2025.07.30
フィジカルAIを活用した双腕アームロボットOmniHostが神奈川県事業に採択されました
-

お知らせ 2025.02.03
当社が開発に携わっている大阪・関西万博「AIスーツケース」がプレスリリースされました