

WORKS 開発事例
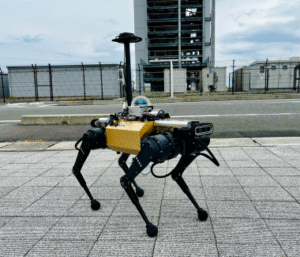
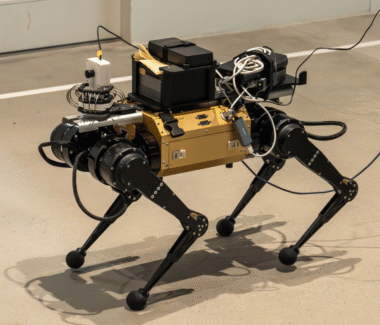
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
(2025年10月29日時点の記事です)
株式会社クフウシヤがフィジカルAI開発を進める「国産四脚ロボット」の最新情報をお届けします。
1. クフウシヤが目指す四脚ロボットの未来
四脚ロボットは、一般的な車輪型ロボットと比べ不整地移動に優れ、近年世界中で注目されています。
四脚ロボットがその走破能力を屋外/屋内で、特に不整地において存分に発揮するためには、脚(接地点)をいかに最適化して制御するかという「歩容」の制御アルゴリズム開発が課題です。
当社は、四脚ロボットの三本柱として、①走行性、②悪路走破性、③高速通信性を掲げ、開発を推進しています。
本記事では、その中でも特に重要な「走行性」に関する最新の開発状況を3つご報告します。
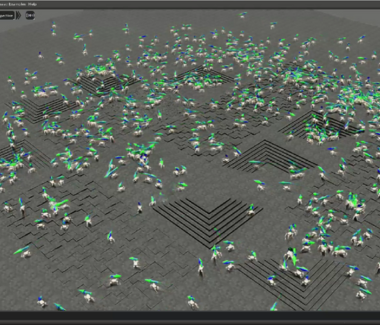
成果報告1:制御アルゴリズムの探求(MPCによる歩行シミュレーション)
四脚ロボットの歩行制御において確立された手法である「モデル予測制御(MPC)」などのアルゴリズムを用いて、シミュレーション環境での歩行制御の最適化を進めています。
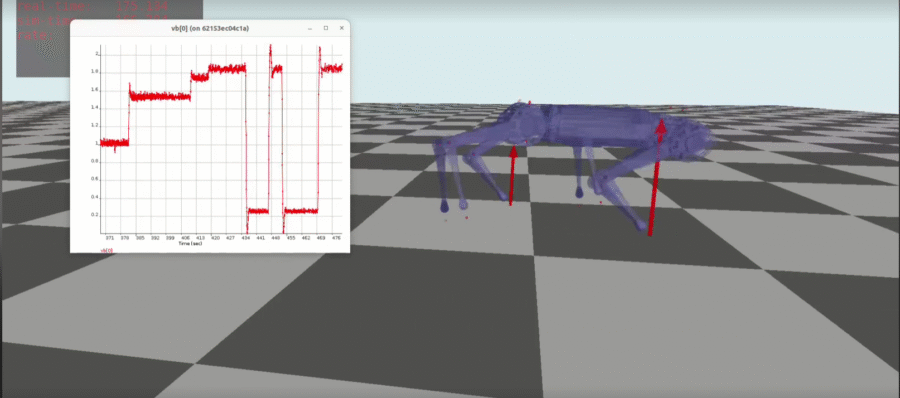
このアプローチでは、従来の歩容である「トロット(trot)」から、より高速な「trotRunning」歩容に切り替えることで、シミュレーション環境にて2.0m/sを記録しました。
成果報告2:最先端技術による実機での高速走行達成(強化学習・Sim2Realで2.0m/s)
シミュレーション環境で最適化された制御を実機に適用するだけでなく、近年急速に進展している強化学習を用いたアプローチにも注力しています。
強化学習で生成したポリシーをSim2Real(※)の手法で実機に適用。実際の走行テストにおいて、歩行速度2.0m/sを達成しました。
これは実機において、最先端の制御技術を駆使して実用的な環境での高速移動の可能性を示す大きな一歩です。
今後は低速・高安定な歩容の生成にも応用し、様々な地形における安定した移動(悪路走破性)の実現を目指します。
成果報告3:傾斜・段差への適応性向上(28度の傾斜をクリア)
複雑な地形への適応性を高めるため、「傾斜や段差を登る実験」も同時に進めています。
これまでの歩容制御アルゴリズムは、平地での歩行を想定していたため、斜度が大きくなると安定した歩行が困難になるという課題がありました。
この問題を解決するため、クフウシヤは新しいアルゴリズムを開発しました。
このアルゴリズムでは、接地推定に基づいて斜面の角度を正確に推定できます。
その推定角度に合わせて、ボディの姿勢と足の着地位置を適応的に調整することで、傾斜地を安定して登板できる歩行動作を実現しました。
今後は、ブロックで積みあげた段差昇降など、実際の現場に即した多様な傾斜や段差での実証実験を進めています。
2. まとめと今後の展望
今後も、この歩行技術と地形適応能力をさらに磨き上げ、鉄道現場の点検や工場の監視業務など、「現場仕様に特化した」実用性の高い国産四脚ロボットの完成を目指します。
引き続き、クフウシヤのロボット開発にご期待ください。
当社では、実証実験やPoC(概念実証)のご相談を、いつでもお受付しています。
Sim2Real(※)の詳しい記事はこちら
四脚ロボット開発の関連記事
WORKS 関連事例
-

ロボット開発 2026.01.20
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
-

ロボット開発 2025.12.11
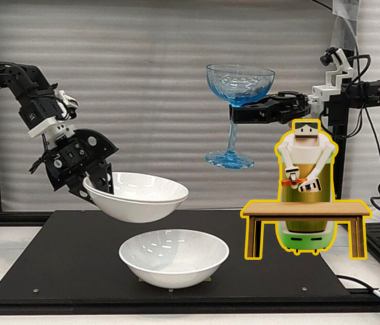
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-
ロボット開発 2025.06.04
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
-

ロボット開発 2025.05.30
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.05.21
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
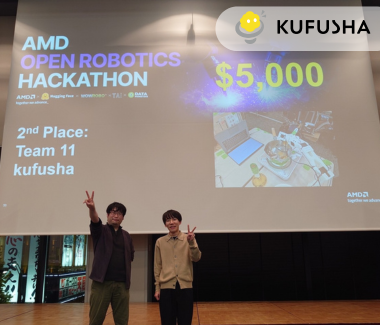
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました
-
お知らせ 2025.07.30
フィジカルAIを活用した双腕アームロボットOmniHostが神奈川県事業に採択されました
-

お知らせ 2025.02.03
当社が開発に携わっている大阪・関西万博「AIスーツケース」がプレスリリースされました