

WORKS 開発事例
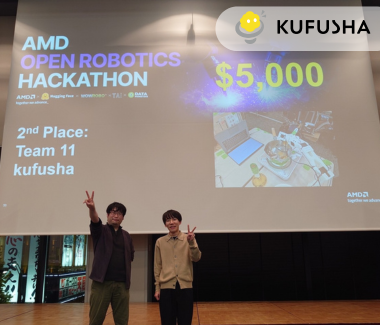
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
(2025年12月11日現在の記事です)
この度、クフウシヤのエンジニアチームは、12/5(金)~12/7(日)の3日間で開催された「AMD Open Robotics Hackathon」に参加し、見事第2位を獲得しました!
HuggingFaceが提供するオープンソースの「LeRobot」を活用し、パスタ調理の一連動作を模倣学習で自動化。
本記事では、当日の開発の裏側を公開します。

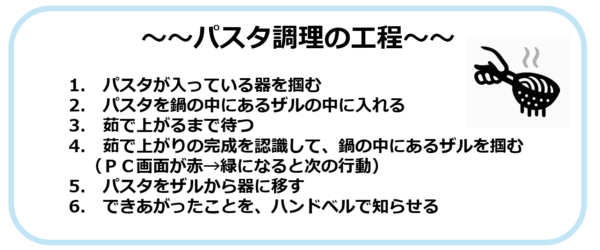
開発プロジェクト「パスタ調理」の自動化
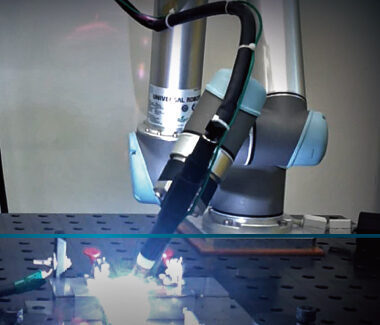
今回、私たちがテーマに選んだのは、「パスタ調理」。
一見ユニークなテーマに見えますが、「道具を使った操作」「複数工程の連携」など、様々な作業現場にも通じる高難易度な課題を含んでいます。

AIに「良質なデータ」を学習させるためのこだわり
多くの企業がフィジカルAIのPoCで直面するのは、「いかにロボットに正しく動作を教えるか(データ品質)」の壁です。
今回のハッカソンで評価されたのは、まさにそのデータ品質のエンジニアリング力でした。
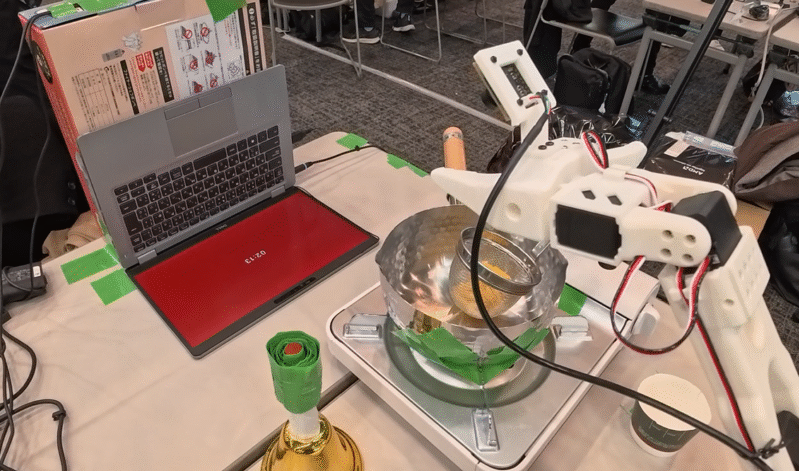
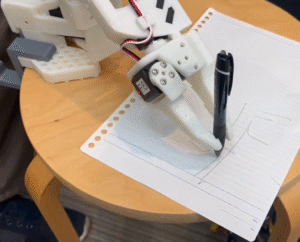
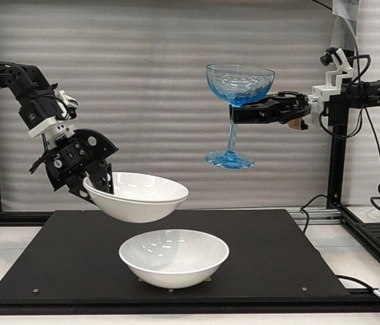
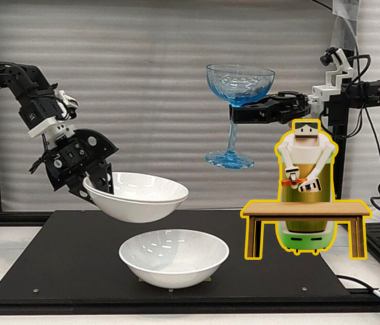
1.カメラ配置
弊社チームは、開発時間の貴重な1時間を「カメラ配置」のみに費やしました。
特に、アームの手首(リスト)にあるカメラで物体を掴む際、「掴む前」と「掴んだ後」の両方の状態で、対象物がフレーム内に確実に収まる画角を徹底的に検証しました。
これにより、AIが状況を見失う(ロストする)リスクを最小限に抑えています。

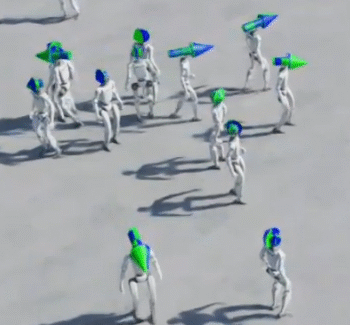
2. 教示データ
人間がロボットに動作を教える際(テレオペレーション)、重要になるのがノイズの除去です。
■ 低速動作の徹底:可能な限りゆっくりと動作させることで、AIが学習しやすいクリアなデータを取得。
■ 特異点の回避:アームの可動範囲に余裕を持たせ、ロボットが完全に伸びきるなどの制御不能な姿勢を避ける設計
■ 干渉回避:他の物体や環境への接触を避ける軌道設計
これらにより、AI特有の「予期せぬ振動」や「暴走」を防ぎ、滑らかな動作生成を実現できました。
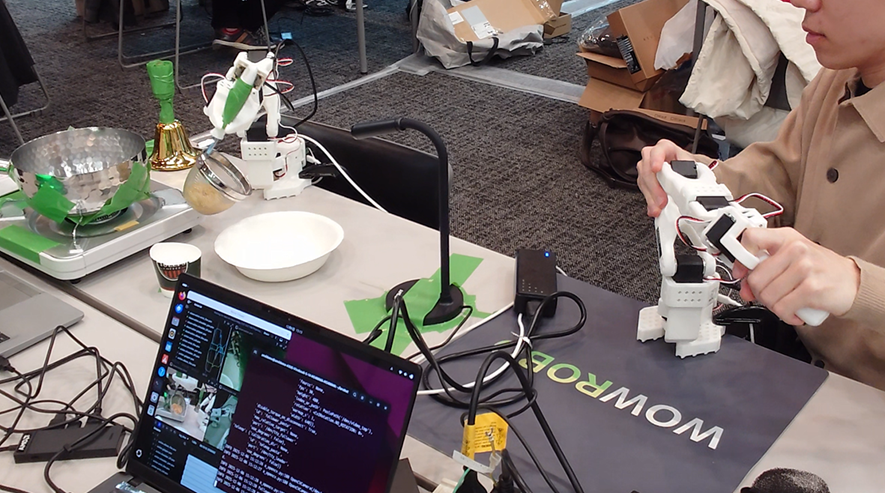
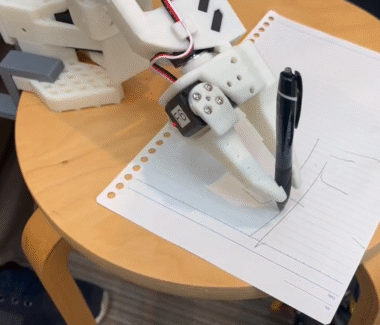
3. バイナリ制御
ハンド(グリッパー)の操作において、「少し開く」といった中途半端な状態はAIの判断を迷わせる原因になります。
今回は、ハンドの状態を「完全に閉じる」か「完全に開ける」かの二択(バイナリ)に制限。この割り切りにより、把持の成功率(歩留まり)を劇的に向上させました。
弊社エンジニアが上記3点に徹底的にこだわり、今回の2位受賞に繋がりました。
また、他の参加チームとも積極的に情報交換し、記録エピソード数・学習回数・モデルの選択と動作結果の傾向など、フィジカルAIの新たな知見も得ることができました。

クフウシヤの「ひと工夫」
パスタの茹で時間中にLeRobotの動きを待たせるために、
「3分間のタイマーをセットし、ノートPCのディスプレイ画面を赤→緑に変更することでロボットに認識させる」というひと工夫を入れています。
柔軟な発想で課題を解決することが、クフウシヤの強みの1つでもあります。

ハッカソン3日間の内、実際に開発作業に集中できたのは2日目のみでしたが、他チームと比較しても高いタスク成功率を実現することができました。
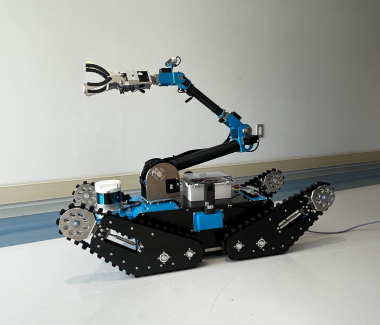
クフウシヤの「模倣学習xアームロボット」の取組み
今回のハッカソンでの受賞で、当社の「ハードウェアの制約とAIの特性を理解し、現場で確実に動く開発力」を実証することができました。
当社では、VLAやフィジカルAIに特化して研究開発に取り組んでいます。過去の記事はこちらからご覧になれます。
工場、プラント、設備点検の現場や、人間が操作することが難しい環境での作業など、
フィジカルAIや自動化などをご検討の際は、ぜひお気軽にお問合せください。
WORKS 関連事例
-

ロボット開発 2026.01.20
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
-

ロボット開発 2025.10.30
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-
ロボット開発 2025.06.04
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
-

ロボット開発 2025.05.30
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.05.21
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました
-
お知らせ 2025.07.30
フィジカルAIを活用した双腕アームロボットOmniHostが神奈川県事業に採択されました
-

お知らせ 2025.02.03
当社が開発に携わっている大阪・関西万博「AIスーツケース」がプレスリリースされました