

WORKS 開発事例
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
(2026年1月20日現在の記事です)
当社では、次世代の自動化ロボットの1つとして、LimX Dynamics社の二足歩行ロボット「TRON1」の研究開発および実証実験を行っています。

工場やプラントの巡回や搬送などの課題解決において、ロボットの形状は必ずしも「人型(ヒューマノイド)」だけが正解とは限りません。
現場で重要視されるのは、「階段や段差があっても、重い荷物を安定して、素早く運べること」ではないでしょうか。
段差や階段を止まらずに越えたり、荷物を載せても安定して、移動スピードも変わらない。
当社では、車輪と歩行を使い分ける「マルチモーダル」な移動性能に着目しました。
仮想空間での学習(Sim2Sim、Sim2Real)と実機検証を組み合わせ、実環境で「本当に使える」ロボット開発プロセスを構築しています。
なぜTRON1なのか?AGVやヒューマノイドとの違い
工場やプラント、建設現場などの「不整地」における移動課題を解決するため、TRON1は独自の強みを持っています。
■AGV(Automated Guided Vehicle/無人搬送車)の課題:階段や大きな段差が越えられない。
■ヒューマノイドの課題:移動速度が遅い。
TRON1は、これらを解決する「第3の選択肢」です。
足先をPoint-Foot(点接触)、Sole-Foot(足裏)、Wheel-Foot(車輪)の3種類から付け替え可能なマルチモーダル設計を採用。
平地は車輪で高速移動し、階段は二足歩行で踏破するといった、環境に合わせた最適なカスタマイズが可能です。


「現場で評価される」TRONの特徴
1.階段・段差に強い
工場や大規模施設では、段差や階段を完全になくすことはできません。
TRON1を活用すれば、段差・階段・踊り場・スロープを前提条件として扱えるため、段差のたびに減速や停止させたり、介助をする必要がなくなります。


2.安定して重い荷物を運べる
TRONは、低重心で安定、荷物搭載を前提の構成となっています。
このため、重量のあるセンサ―類や計測装置、工具や点検用荷物などを載せても、移動性能を維持しやすいです。
3.歩行スピードが速く、移動がボトルネックにならない
現場で協働するロボットにとって、移動スピードが課題になりがちです。
巡回に時間がかかる、待ち時間が増える、人間の作業とタイミングが合わない等が想定されます。
TRON1は、安定性を維持しながら、段差・階段を含むルートでも、比較的速い速度で移動速度を維持できます。
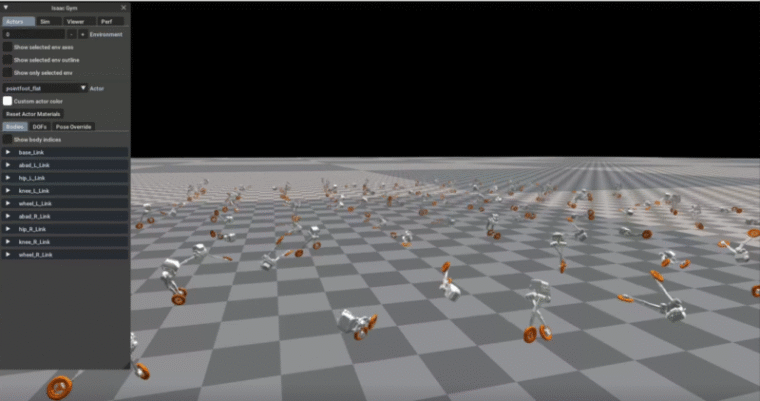
Sim2Sim・Sim2Realの取組み
当社では、TRON1の性能を最大限に引き出すため、フィジカルAIによる制御精度の向上に取り組んでいます。
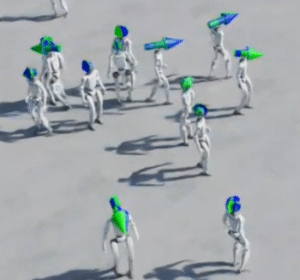
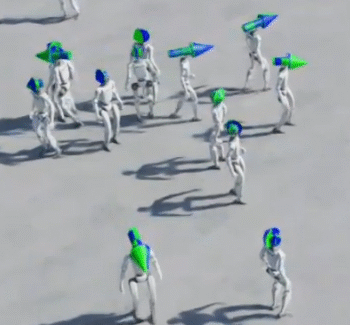
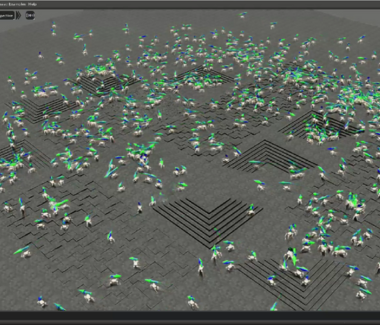
シミュレーション環境における強化学習(Sim2Sim/Sim2Real)を継続し、「未知の段差でも転ばずに踏ん張る」「滑りやすい床でも姿勢を保つ」といった高度な制御を、短期間で実装することを目指しています。
学習には一晩を要するため、検証と改善の機会は日次サイクルとなります。 毎朝、前夜の学習結果に基づいた進捗確認を行い、パラメータの最適化を実施しています。
シミュレーションと実機検証(Sim2Real)のサイクルを回すことで、現場ごとの特殊な環境要件にも迅速に対応可能な開発体制を構築しています。
TRON1の発展性
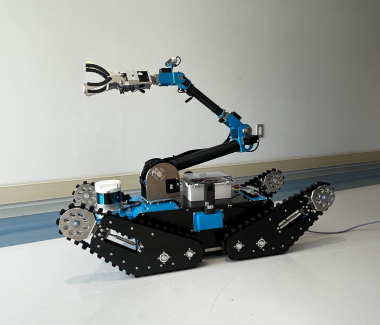
TRON1は拡張アクセサリとして、アームの取り付け、音声対話、LiDARと深度カメラによる3Dナビゲーション等もカスタマイズ可能です。
昨年末、TRON2として上半身と下半身に分かれた動画も公開されています。
「工場の階段点検を自動化したい」「不整地での搬送を検討している」など、ヒューマノイドだけではなく、
工場での巡回点検作業や人間との協働ロボットとして、TRON1の実証実験にご興味のある方は、ぜひお気軽にご相談ください。
当社の他のSim2Real開発の取組みはこちら
【参考】LimiX Dynamics社 TRON 1: https://www.limxdynamics.com/en/tron1
WORKS 関連事例
-

ロボット開発 2025.12.11
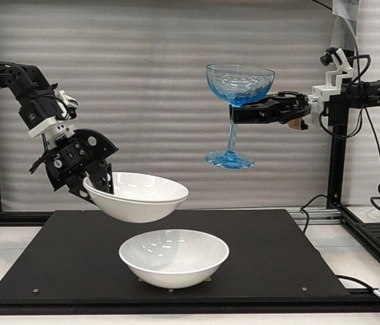
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
-

ロボット開発 2025.10.30
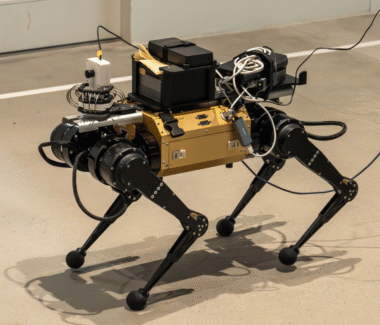
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-
ロボット開発 2025.06.04
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
-

ロボット開発 2025.05.30
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.05.21
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました
-
お知らせ 2025.07.30
フィジカルAIを活用した双腕アームロボットOmniHostが神奈川県事業に採択されました
-

お知らせ 2025.02.03
当社が開発に携わっている大阪・関西万博「AIスーツケース」がプレスリリースされました