

WORKS 開発事例
「おもてなし」をロボットへ。双腕アームロボット「OmniHost」が目指す、宿泊・飲食業の新しいかたち
(2026年3月時点の記事です)
OmniHostとは
「視覚で認識し、言語で指示を受け、自律的に体を動かす」――フィジカルAIが、いよいよ現場レベルでの実用化に近づいています。
飲食店での配膳ロボットは、すでに見慣れた存在になりつつあります。しかし、その多くは「料理を運ぶ」だけ。
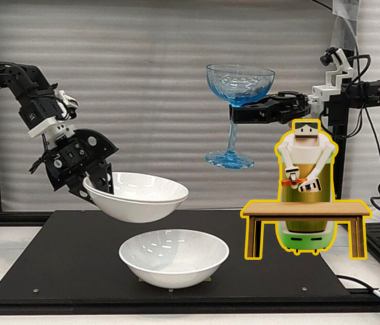
クフウシヤが開発中の双腕アームロボット「OmniHost(オムニホスト)」は、「作る」「片付ける」まで担う、フィジカルAIを活用した次世代のおもてなしロボットです。
本プロジェクトは、神奈川県「さがみロボット産業特区」の令和7年度ロボット実装促進事業にも採択されており、2026年1月には神奈川県の担当者も招いた実証デモを実施しました。
OmniHostの構成:移動×双腕×フィジカルAI
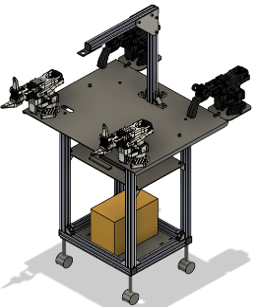
OmniHostは、大きく3つの要素で構成されています。
① 足回り:Kachaka(カチャカ)
自律移動ロボット「Kachaka」を採用。事前にマップを作成しておくことで、指定した場所への自律移動が可能です。
配膳先のテーブルやバックヤードへの移動を自動で行います。
② アームと俯瞰カメラ:
上面に2本のアームと俯瞰カメラを搭載。
模倣学習により、目の前の状況に合わせた動作を自律的に判断・実行します。
③ ハードウェアのカスタマイズ
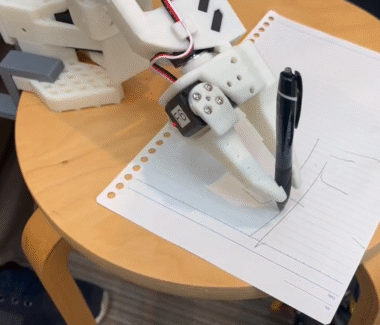
アームにはオープンソースの低コストロボットアーム「SO-101」を採用
ただしそのままでは現場業務に課題があったため、クフウシヤで独自に設計を変更し、BambuLabの3Dプリンターで部品を再印刷して採用しています。
こだわりポイント:現場業務に合わせたハードウェア設計
1:手首部分を「簡単に着脱できる構造」に変更
開発中、アーム手首部分のホーンが外れやすいという問題が発生しました。 毎回モーターを取り外してメンテナンスするのでは、現場運用に耐えられません。
そこで、該当部位のネジ締めを行う際に工具なしで着脱できる構造に設計を変更しました。
現場でのメンテナンス性を最初から意識した設計が、OmniHostのこだわりのひとつです。
■AGV(Automated Guided Vehicle/無人搬送車)の課題:階段や大きな段差が越えられない。
■ヒューマノイドの課題:移動速度が遅い。
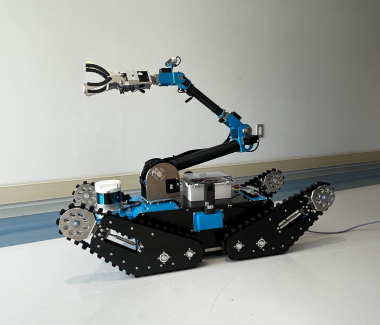
TRON1は、これらを解決する「第3の選択肢」です。
足先をPoint-Foot(点接触)、Sole-Foot(足裏)、Wheel-Foot(車輪)の3種類から付け替え可能なマルチモーダル設計を採用。
平地は車輪で高速移動し、階段は二足歩行で踏破するといった、環境に合わせた最適なカスタマイズが可能です。

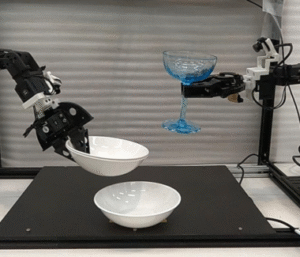
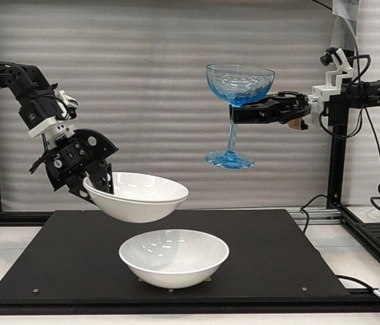
2:グリッパーの形状を「コップ・皿に合わせた形」に変更
標準のグリッパーでは、飲食現場で使われるコップや皿をしっかりと把持できませんでした。
クフウシヤでは形状を用途に合わせて設計し、滑りにくく・落とさないグリッパーに改良しています。
実装した3つの動作
OmniHostは、現場ヒアリングをもとに以下の3つの業務動作を実装しました。
① 配膳・下げ膳
■ 配膳:デシャップ(料理受け渡し口)から料理の乗った皿を取り、シェルフに載せてお客様のテーブルへ届ける
■ 下げ膳:食べ終わった皿をテーブルから回収し、シェルフに載せてバックヤードへ戻す
クフウしたポイント:
皿の色とサイズが変わってもアームが対応できるようにクフウしました。今回は3サイズ×4色の皿を想定しており、どの組み合わせが来ても正しく動作させる必要がありました。
すべての組み合わせを網羅するためにエピソードを積み上げ、最終的に120エピソード・10万stepの学習で対応できるようになりました。
皿の上に載っている料理を変えても問題なく動作します。
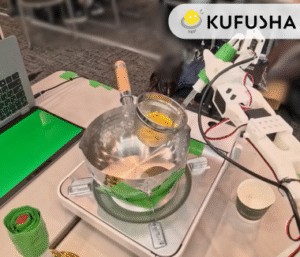
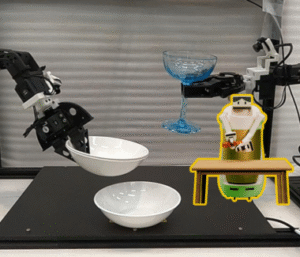
② ドリンク制作
ストレート・割もの・ソフトドリンクの3パターンの動作を実装。注文に応じて動作を切り替えます。
クフウしたポイント:
動作の状態管理をクフウしました。問題点として、「注ぐ」動作の際に、1回注いだ後に再度注いでしまうという現象が発生しました。
模倣学習は「ある画像のときにどう動く」を学習する仕組みのため、同じ画像状態が繰り返されると混乱が起きます。
筐体内にモニターを設置し、状態に合わせて画面の色を変化させることで、AIが「今どの状態か」を視覚的に区別できるようにしました。
このクフウにより、40エピソード・10万stepの学習でスムーズに動作するようになりました。
③ 皿の仕分け
下げられた皿を食洗機に入れる前に、サイズごとに仕分ける動作です。複数の皿がランダムに置かれた状況に対応します。
クフウしたポイント:
皿の枚数も配置もランダムのため、起こりうるすべての状況のエピソードを網羅する必要がありました。最終的に240エピソード・10万stepの学習で動作を実現しています。
大変だったこと:「場所を変えると動かなくなる」問題
模倣学習を用いたロボット開発で、多くの開発者が直面する壁があります。
「ある場所では完璧に動いていたのに、違う場所に移動したら全く動かなくなった」 という問題です。
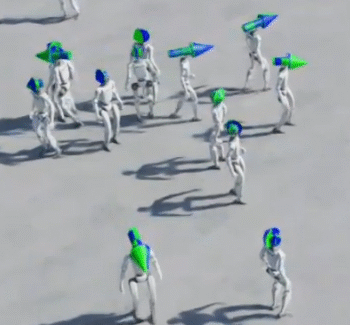
今回採用したACT(Action Chunking with Transformers)は、観測画像をそのまま入力とする仕組みのため、背景・光・色といった視覚的な変化に敏感で、環境が変わると動作が不安定になりやすいという特性があります。
OmniHostでも同様の事態が発生し、さらにはドリンク制作の筐体から防水ビニールを外して付け直しただけでも動作しなくなるという事例もありました。
このとき問題になるのが、「ファインチューニングで対応するのか、0からデータを取り直すのか」 という判断です。
今回はドリンク制作では0から取り直し、皿関連ではデータセットを追加して再学習させる方法をとり、いずれも動作できるようになりました。
ただ、時間が限られた現場でどちらを選ぶべきか素早く判断できるようになることが、今後の課題のひとつです。
一方、π0.5のような次世代モデルでは汎化性能が向上しており、環境変化に対してより安定した動作が期待できます。
なお、OmniHostの開発を開始した2025年9月時点では、π0.5はまだLeRobotに実装されておらず、今回はACTでの開発が現実的な選択でした。
その後、フィジカルAIの分野では新しいモデルが次々とリリースされています。
クフウシヤでは高性能GPU「Jetson Thor」も導入済みで、π0.5やsmolVLAをはじめ、今後登場するモデルにもキャッチアップしながら、この課題の解決に取り組んでいきます。
まとめ:アームロボット×フィジカルAIの可能性
OmniHostは、配膳・ドリンク制作・皿の仕分けという現場に即した3つの動作を実現し、開発の第一フェーズを完了しました。
宿泊・飲食業での人手不足は深刻な課題です。将来的には、従業員が音声で指示するだけでロボットが最適な動作を判断・実行できるフィジカルAIの構築を目指しています。
OmniHostは、単なる「配膳ロボット」ではなく、現場に溶け込む「おもてなしのパートナー」を目指したプロジェクトです。
アームロボットの導入・共同開発をご検討の方へ
クフウシヤでは、フィジカルAIを活用したアームロボットの研究開発・受託開発を行っています。
「こんな業務を自動化できないか」「PoC(概念実証)から一緒に取り組みたい」など、まずはお気軽にご相談ください。
関連記事
WORKS 関連事例
-

ロボット開発 2026.01.20
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
-

ロボット開発 2025.12.11
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
-

ロボット開発 2025.10.30
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-
ロボット開発 2025.06.04
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
-

ロボット開発 2025.05.30
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.05.21
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました
-
お知らせ 2025.07.30
フィジカルAIを活用した双腕アームロボットOmniHostが神奈川県事業に採択されました
-

お知らせ 2025.02.03
当社が開発に携わっている大阪・関西万博「AIスーツケース」がプレスリリースされました