

WORKS 開発事例
【TRON1】NavigationとMID360で障害物回避してみた!オドメトリ課題の解決方法【ROS2/自律移動】
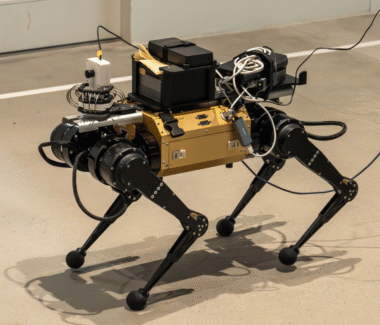
クフウシヤにアルバイトで来ている学生さんが、LimX Dynamics社の二足歩行ロボット「TRON1」にMID-360を取り付けて障害物回避に挑戦しました!
自律移動の仕組み
TRON1の自律移動は、大きく3つの要素で成り立っています。
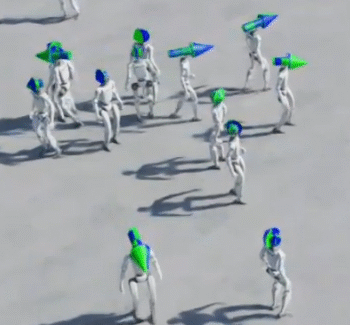
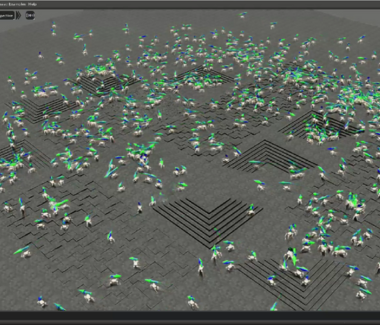
■ 地図生成(SLAM):LiDARで周囲をスキャンし、環境の地図を作成する
■ 自己位置推定:作成した地図上で「自分が今どこにいるか」を把握する
■ ナビゲーション(Nav2):目標地点までの経路を計画し、障害物を避けながら移動する
今回使用したセンサーは Livox MID360。
レーザーを360度に照射して周囲の形状を3Dで把握する、TRON1の「目」にあたるセンサーです。

開発の流れ
① 地図生成の確認
まずMID360で3D SLAMを試み、地図の作成まで確認できました。
ただこの時点では、TRON1からのオドメトリが出力されない問題が発生しました。
脚車輪型のため常に微妙に動いており、値が安定しないことが原因ではないかと思われます。
そこで 、MID360のIMUからオドメトリを取得する方式に切り替えたところ、自己位置推定ができるようになりました。
② Nav2の初起動
Local Costmapが生成されない問題が発生しましたが、設定yamlを参考記事をもとに再構築して解決し、Nav2の初起動に成功しました。
実際に障害物回避を試してみると、スタックしたり回転を繰り返したりする現象が発生しましたが、TRON1の最小速度パラメータとNav2の最小速度を合わせることで、この問題も改善しました。
③ 障害物回避・自律移動に成功!
改善を重ねた結果、TRON1が障害物を認識しながら目標地点へ自律移動することに成功しました!
さらに精度向上のため、自己位置推定のアルゴリズムをAMCLから emcl2 に切り替え、コストマップ範囲と最大速度も調整しました。
これにより向きのずれが改善し、より安定したナビゲーションを実現しました。
まとめと今後の展望
自律移動の実現には、地図生成・自己位置推定・ナビゲーションの3つをしっかり連携させることが重要でした。
TRON1のような脚車輪型ロボット特有のオドメトリ問題など、実機開発ならではの難しさもありましたが、一つひとつ乗り越えることができました。
今後は自己位置推定の精度向上を中心に、より複雑な環境でも安定して動けるTRON1を目指します。
クフウシヤでの開発を一緒に体験してみませんか?
クフウシヤでは、アルバイトやインターンを随時歓迎しています!
ロボットやフィジカルAIに興味がある学生エンジニアの方、まずは見学からでもお気軽にご連絡ください。

関連記事

WORKS 関連事例
-

ロボット開発 2026.03.31
「おもてなし」をロボットへ。双腕アームロボット「OmniHost」が目指す、宿泊・飲食業の新しいかたち
-

ロボット開発 2026.01.20
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
-

ロボット開発 2025.12.11
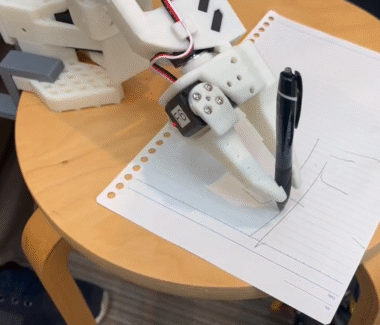
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
-

ロボット開発 2025.10.30
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-
ロボット開発 2025.06.04
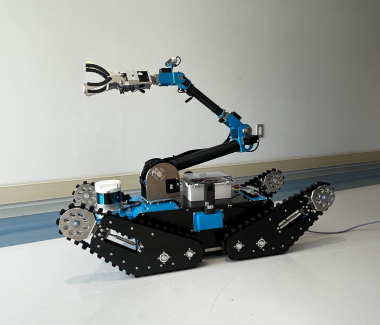
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
-

ロボット開発 2025.05.30
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.05.21
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました
-
お知らせ 2025.07.30
フィジカルAIを活用した双腕アームロボットOmniHostが神奈川県事業に採択されました
-

お知らせ 2025.02.03
当社が開発に携わっている大阪・関西万博「AIスーツケース」がプレスリリースされました