

WORKS 開発事例
【Lerobot】フィジカルAIは未知環境に対応できるのか?VLAモデル「π0.5(pi0.5)」の実機検証【 ゼロショット適応性実験】
(この記事は、2026年4月末時点の内容です)
クフウシヤでは、現場の環境変化に柔軟に対応できるVLAモデル「π0(pi0)」を活用した開発を行っています。
π0は、カメラ映像と言葉の指示をもとにロボットの動作を生成するAIモデルとして2024年に登場しました。
多様なロボットや作業に対応できる一方、学習データに近い環境でしか十分な性能を発揮できないという課題がありました。
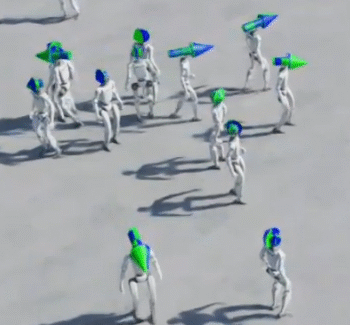
2025年に発表されたπ0.5(pi0.5)はその課題を克服し、一度も見たことのない家のキッチンや寝室の片付けといった作業を追加学習なしでこなせることを実証したモデルです(Physical Intelligence et al., 2025)。
その中でも今回は、「一度も経験(学習)していない初めての環境や状況でも、臨機応変に自律して動くこと(オープンワールド汎化)」を目指して開発された、非常に柔軟性の高いVLAモデルのひとつである「π0.5」の検証について、まとめました。
①実験の背景と目的
実際のロボット運用環境(工場のラインや作業現場)では、AIに事前に学習させたときと「完全に同じ状態」を毎回再現することは大変難しいです。
そのため、予期せぬ変化にも対応できる特性をもつこのVLAを用いて動作計画を行うことができれば、実務現場において極めて実用性が高く、画期的な解決策となります。
そこで本試験では、事前学習とは異なる複数の「初見のシチュエーション」を用意し、「π0」がどれだけ臨機応変に対応できるかを検証しました。
実際の現場でも安心して運用できるように、
1:「作業成功率80%以上」を目標に設定
2:万が一失敗した場合でも、その原因を詳細に記録・分析
3:2の結果を今後のデータセット収集や学習条件の見直しに反映→さらなる改良にフィードバック
というように、実用フェーズにおける動作成功率の向上につなげることを目的とします。
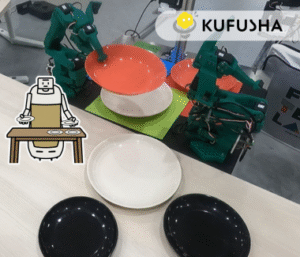
②実験環境と前提条件

■ 動作条件
① 対象物、ゴール目標はそれぞれアームに対して右側、正面側に配置する。
② ゴール目標である黒トレイは接着剤などの固定を行わず、自由に動作できるようにする。
③ WebカメラにはLeaderアームとGoPROが映らないように事前に調整する。
④ Folloerアームのグリッパーには緑色のビニールテープと緩衝材を巻き付けており、手先の識別性の向上と把持時のグリップ性の向上を図っている。
⑤ 作業時に環境の影響を考慮するため、追加照明などは配置せず、実験環境周辺を壁で囲うなどは行わないものとする。
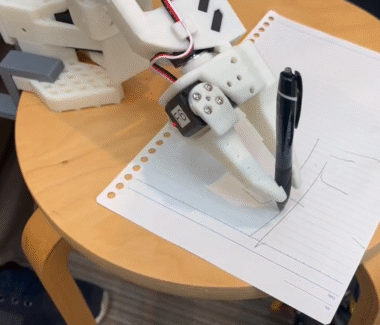
■ 使用部材
1 SO101:白(Followerアームとして)
Lerobotフレームワークが利用できる物理アームとして選定。
また、グリッパーやワークの状態確認のためグリッパーリンクにWebカメラを増設している。
2 SO101:黒(Leaderアームとして)
Lerobotフレームワークが利用できる物理アームとして選定。こちらはデータ・セット収集のみ。
3 Webカメラ
作業環境をアーム対面から撮影するカメラ。
今回は作業の状態、アームの位置などを確認しやすくする工夫として斜めを向くように設営し、アーム、作業面を十分に撮影できるように画角の調整を行っている。
4 養生材:白
作業領域を示す四角い養生シート。作業卓の色と明確に区別できるような色のものを選定した。
5 トレイ:黒
今回のタスクにおける目標位置(ゴール)。このトレイに対象物を乗せるような作業を行う。なお、作業領域に対して固定は行わないものとする。
6 対象物
一般流通している袋入りの飴。今回は、3種類の対象物を用意した。
(青い包装の飴、黄色い包装の飴、黒い6面サイコロ)
7 GoPRO
実験撮影カメラ、今回の制御システム外で動作し、動画記録に利用している。
3のWebカメラに映らない位置において撮影するように注意した。
③学習データの収集
今回の検証では、以下のようなシナリオでLeaderアームを用いて動作を記録しました。
1:アーム右側の対象物(動画では青い包装の飴)に向かって移動。
2:グリッパーを展開し、対象物を把持するために位置合わせを行う。
* 位置合わせの際にグリッパー手先が片方しか映らないため、映る側のグリッパー手先を対象物に当てるように位置合わせを行う。
3:対象物を把持・持ち上げを行う。
4:持ち上げた対象物をゴール位置(動画では黒いトレイ)まで運搬し、置く。
5:最後にアームを初期姿勢にもどす。
上記のシナリオにてエピソードを40回記録し、pi0.5ポリシーを使用して学習したものを動作規範として用いて、3つの実験を行いました。
【実験1】:未学習の色の対象物を運搬(黄色いお菓子の袋をつかんで、黒いトレイに置く)
実験1では、「色の情報のみを未知とする」ため、対象物の位置・姿勢は固定としました。
<実験方法1>黄色いお菓子の袋をつかんで、黒いトレイに置く
■ 実験回数:10回
*動作パラメータは事前に調整した実機パラメータを使用する。
■「Pick up the yellow snack packet and place it in the black tray.」を、textプロンプトに与えて実行
<実験結果1>
動作成功率 90%(10回中9回成功):目標成功率を達成!
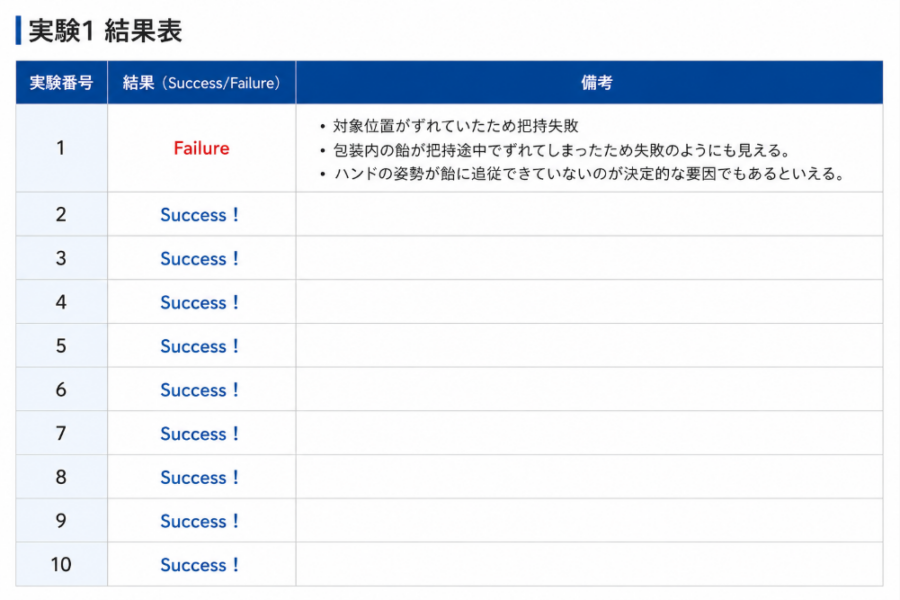
<考察>
この実験では、色の情報の違いにより成功率が下がるような挙動は見られないことがわかりました。
【実験2】:未学習の色・形状を持つ対象物の運搬(黒いサイコロをつかんで、黒いトレイに置く)
<実験方法2>
実験2では、色と形状の情報を未知とするため、対象物の位置・姿勢は固定としました。
■「Pick up the black dice and place it in the black tray.」を、textプロンプトに与えて実行
■ 実験回数:10回
動作パラメータは事前に調整した実機パラメータを使用する。
<実験結果2>
動作成功率 90%(10回中9回成功):目標の成功率を達成!
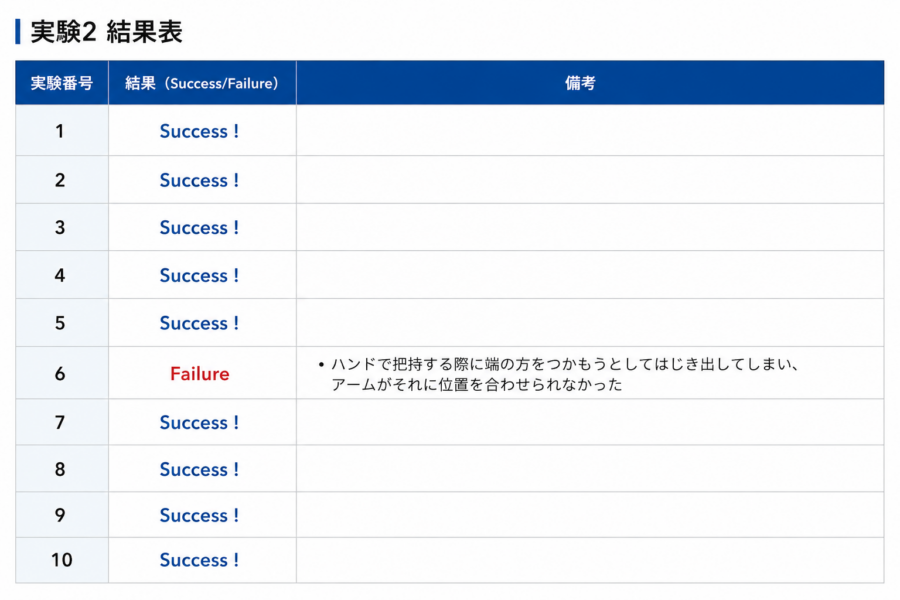
<考察>
実験2の結果により、色・形状の違いにより成功率が下がるような挙動は見られないことがわかりました。
【実験3】:未学習の位置にある対象物の運搬(青いお菓子の袋をつかんで、黒いトレイに置く)
<実験方法3>
実験3では、開始位置とゴール位置を学習時と異なる位置を与えて実験する。対象物は青のお菓子とし、位置・姿勢は固定としました。
■ 実験回数:10回
動作パラメータは事前に調整した実機パラメータを使用する。
また、位置の違いを与えるため、実験環境の一部を変更する。
【 変更前 】
アメはアームに対して右に位置するように、ゴールの黒トレイはアームに対して左に位置するように配置する
【 変更後 】
アメはアームに対して左に位置するように、ゴールの黒トレイはアームに対して右に位置するように配置する
<実験結果3>
動作成功率 30%(10回中3回成功):目標成功率未達成
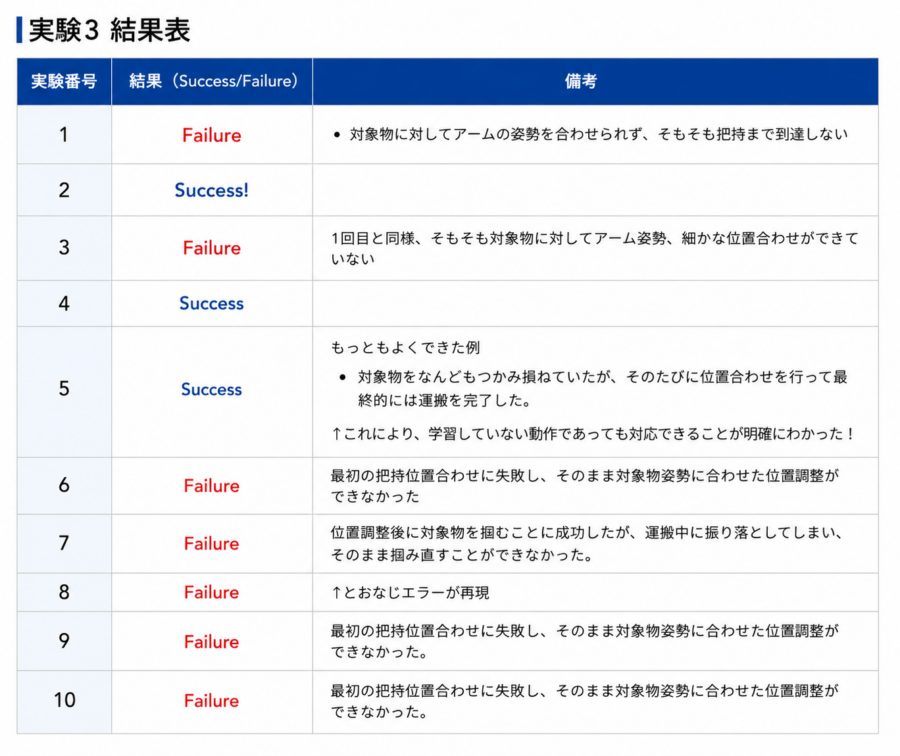
<考察>
他の実験に比べて、成功率が極端に減少する傾向が見られました。
失敗したパターンに共通して見られたのは、以下の2点でした。
①アームを対象物の位置まで動かせず、また把持できる姿勢の調整ができない
②つかめたとしてもゴールまでの運搬途中でグリッパーが開いて振り落としてしまう
まとめ:
今回は3つの検証を行い、大きく分けて以下の2つがわかりました。
■ 色・対象物の情報の違いよって、動作の成功率が下がる挙動は見られない(実験1、実験2)
■ 開始位置とゴール位置を学習時と異なる位置だと、アームが対象物姿勢の調整ができない。
対象物をつかめたとしても、運搬途中で落としてしまう。(実験3)
今後も実験内容を変えて、動作成功率の向上につながる追加検証を行う予定です。
当社では、オープンソースのモデルを活用し、現場で動くロボットを目指して深堀した研究開発などにも取り組んでおります。
VLAモデルを活用した課題解決において、どのモデルが適切か、モデルよってどう違うかなどのご相談も可能です。
関連記事

WORKS 関連事例
-

ロボット開発 2026.05.11
【Go2】点検・巡回用の四脚ロボットが強化学習でオープン階段を歩行【Sim2Sim/Sim2Real】
-

ロボット開発 2026.04.06
【TRON1】NavigationとMID360で障害物回避してみた!オドメトリ課題の解決方法【ROS2/自律移動】
-

ロボット開発 2026.03.31
「おもてなし」をロボットへ。双腕アームロボット「OmniHost」が目指す、宿泊・飲食業の新しいかたち
-

ロボット開発 2026.01.20
段差や階段でも倒れない!車輪型二足歩行ロボット「TRON1」とSim2Realで実現する巡回・運搬
-

ロボット開発 2025.12.11
【AMDハッカソン第2位】LeRobotx模倣学習で示すフィジカルAIの実装力!
-

ロボット開発 2025.10.30
国産四脚ロボット開発進捗:Sim2Realで歩行速度2.0m/s達成、段差昇降の安定化へ!
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ソフトウェア編】
-

ロボット開発 2025.09.19
大阪・関西万博で実証へ:新型AIスーツケースのロボット開発に技術協力【ハードウェア編】
-
ロボット開発 2025.08.28
ヒューマノイドが「歩き方」を独学する瞬間!【Sim2Real検証とVLAの活用事例】
-
ロボット開発 2025.07.28
SmolVLAで低コスト・高性能AIロボットを実現 【Hugging Face LeRobot 】
-
ロボット開発 2025.06.11
フィジカルAI時代の幕開け!ヒューマノイドロボットの未来
-
ロボット開発 2025.06.04
World Robot Summitへの挑戦!災害対応ロボット『MISORA2.0』開発の道
-

ロボット開発 2025.05.30
現場課題を支える!カスタマイズ可能な「国産製 四脚歩行ロボット」の開発【Sim2Real活用事例】
-

ロボット開発 2025.05.23
Open Duck Mini :かわいい見た目で、現場に入り込む新しいかたち?
-
ロボット開発 2025.05.21
「シミュレーションから現実世界へ!国産四脚ロボット開発の現場から」
-
ロボット開発 2025.04.21
模倣学習によるロボット制御の研究開発ー VLAの可能性を見据えて ー
-
ロボット開発 2021.07.16
精密板金 曲げ工程のマシンテンディング
-

ロボット開発 2021.02.28
階段昇降ロボットの開発
-

Asion 2020.12.29
ドライ清掃ロボット「Asion」開発秘話
-
ロボット開発 2019.12.18
TIG溶接支援ロボット
-

ロボット開発 2018.11.01
切削加工 マシニングセンターのマシンテンディング
RELATED NEWS 関連ニュース
-
お知らせ 2026.05.28
経済産業省「廃炉・汚染水・処理水対策事業」でフィジカルAI搭載ロボット技術の開発を開始します
-
お知らせ 2026.03.02
【ネットワンシステムズ様との共創プロジェクト】Local5G×国産四脚ロボット遠隔操縦の取り組みを掲載いただきました
-

お知らせ 2026.02.26
【福島で実現するフィジカルAIとヒューマノイド×廃炉】Hama Tech Channelにて当社の取り組みを掲載いただきました
-
メディア掲載 2026.01.28
日本経済新聞にて当社の「フィジカルAIを活用したロボット開発」の取り組みをご紹介いただきました
-
お知らせ 2025.12.11
「AMD Open Robotics Hackathon」で、当社チームが2位を受賞しました
-

お知らせ 2025.10.03
AI・ロボットの社会実装を推進する「AIロボット協会(AIRoA)」に加入しました